GEMs stands for Geo-localization and Mosaicing System. This software is used to visualize the flight data gathered from the GEMS hardware payload. GEMs is a custom built sensor UAS applications on small UAVs. The software will automatically access the sub-images recorded to the storage media (jump drive) from the flight and the corresponding metadata. Orthomosaiced RGB (red, blue, green), NIR or NDVI (Normalized Difference Vegetation Index).

Gem is a precision agriculture multispectral sensor payload for remote sensing on small UAV's. It is designed to be a completely stand alone hardware sub system. This design allows for ease of integration on any size and type of platform such as a fixed wing, rotary, or RC. The GEMs hardware captures RGB, NIR, and DNVI imagery in a single flight.
The Ground Sampling Distance (GSD) is 5.1cm @ 400 feet and 2.5 cm @ 200 feet. The height and the speed of the plane is very important in regards to image quality. The higher the altitude and faster the plane flies, the lower the quality of the image will be. If you fly the plane lower and slower the image quality is better image quality.
GEMs stores the data on a SanDisk Extreme 32GB jump drive media storage device is provided with the GEMs payload. You can use an upgraded one also of 64GB but it is not recommended to use another disk other than the SanDisk for this product. When mounting the GEMs on the UAS always make sure it is pointing towards the ground. No magnetic material should be placed within 4 inches from the payload itself. Magnets will result in an iron anomaly in the magnetometer data and will show up on the mosaicked imagery as misalignments. Vibrations should be minimized by placing a piece of foam between the payload and the motor for insulation.
Parameters for Flight Planning Software: The GEMs payload uses low-distortion optics and for the purpose of flight planning any distortion (radial and tangential) can be assumed negligible. The appropriate value for overlap need to be set starting at 70%. The system will gather images automatically at a rate of 0.7-0.9 seconds between images.
 |
| Figure 2: This image is the Parameters for Flight Planning Software. |
Cannon S110:
 |
| Figure 4: Additional Resolution Information for movies and compression. |
 |
| Figure 3: Still image Resolution of the Cannon S110. |

 |
| Figure 5: The Cannon SX260 has the same operating system requirements as the GEMs software and Adobe Reader is required for installation. |
 |
| Figure 6: This information is shots per memory card and that the pixel data for large, medium and small images. |

DJI Phantom Sensor:
 |
| Figure 8: List of basic features of the advantages of the DJI Phantom Sensor. |
Go Pro: Hero

 |
| Figure 9: Resolution information for the Hero from Go Pro. |
Software Manual:
Currently, GEMs software is only compatible with Windows operating systems (Windows7 and Windows 8).
Every flight is automatically labels a new folder with the Flight Data, ex. (Week=X TOW=H-M-S).
These they are set as numbers immediately when the data collection begins.
The difference between orthorectified and georeferenced is very important.
Georeferenced means to associated something with locations in physical space. The term commonly used in the geographic information systems field to describe the process of associating a physical map or raster image of a map with spatial locations. (Hill, Linda L. (2006). Georeferencing. The MIT Press. ISBN 978-0262083546. An orthophoto is an aerial photo geometricaly corrected or orthrectified such that the scale is uniform: the photo has the same lack o distortion as a map. It can be used to measure true distances, because it is an accurate representation of the Earth's surface, having been adjusted for topographic relief, lens distortion and camera tilt. Orthorphotos are commonly used in the creation of Geographic Information System (GIS).
Smith, Gary S. "DIGITAL ORTHOPHOTOGRAPHY AND GIS." ESRI
Conference. http://proceedings.esri.com/library/userconf/proc95/to150/p124.html
 |
| Figure 10: This figure shows the orthographic image and how it differs from perspective view. |
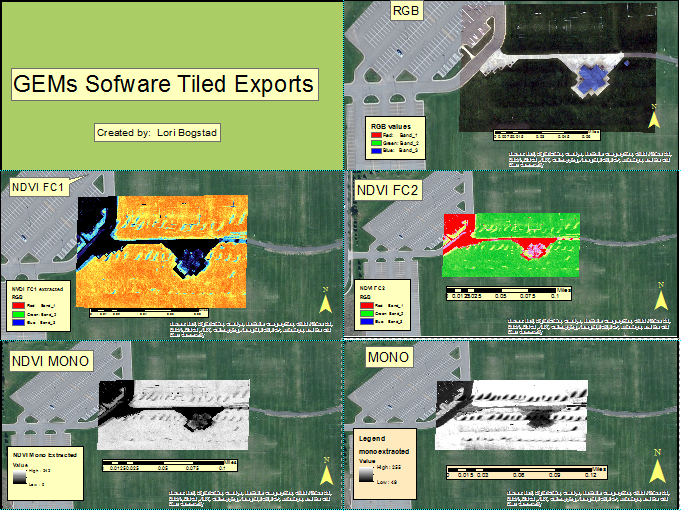 |
| Figure 11: This shows the different types of images that can be taken with the GEMS software. The RGB, NDVI FC1, NDVI FC2, NDVI MONO and MONO. |
RGB: Color model that defines colors in terms of relative amounts of red, green and blue components; black is defined as zero amount of the components, white is the maximum of the components.
NDVI: Normalized Difference Vegetation Index is a simple graphical indicator that can be used in remote sensing measurements, typically but not necessarily from a space platform, and assess whether the target being observed contains live green vegetation or not. The FC1 colors are not representative of a what would be considered such normal expected color scheme. The FC2 shows vegetation in green which is what we would expect to see in a normal photo. More pleasing to look at.
REVIEW OF GEMs:
I feel that the GEMs system is very innovative. I actually thought the manual for the Hardware was very informative and had a lot of information that made it easy to understand. Other parts were in so technical that I had to read them numerous times and look up some terms to somewhat understand it. I felt there should be more definitions of terms and more practical aspects instead of all the technical terms that only someone in the field could answer. The Software manual was confusing and it appeared to repeat the same thing in numerous areas but not answer vital questions such as what a lot of the terms meant and how they worked together. The fact that it claims that the images are orthorectified is not accurate as well. I found it to be a lot of information about the different photo types but they were not well organized for ease of understanding.
I felt overall the manual was better than all of the other manuals I looked up online. The Cannon S110 was the only manual to compare. The rest of the manuals were very minimal. I would chose to use this software even though it is a bit confusing. I feel that if I spent more time reading the software manual again I would further understand it.













